GRAKSLER 4.3
Design
Concept
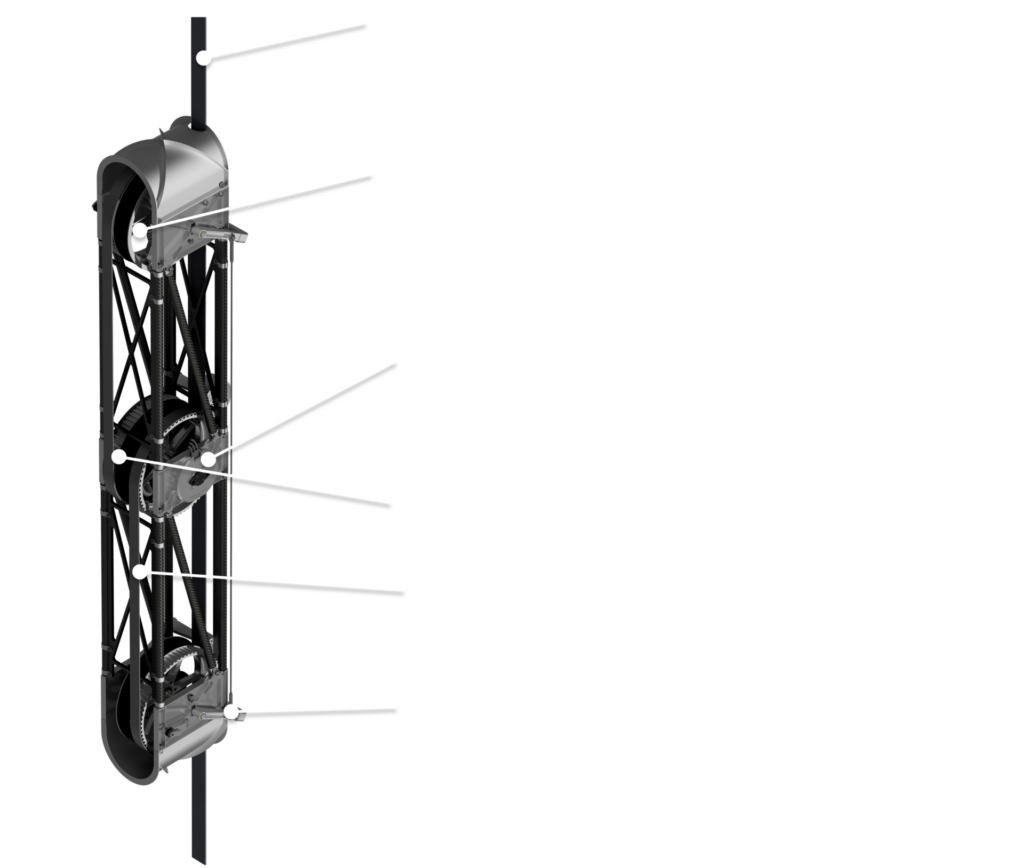
In development since 2018, the GRAKSLER 4.x series of climbers focused heavily on the reduction of structural mass through the use of a lightweight carbon fiber truss structure. The mission of the 4.x series was to demonstrate the ability of a climber system to carry a multiple of its own weight as payload, demonstrating the feasibility of the space elevator concept. At a weight of just 15 kg, the GRAKSLER 4.3 could carry up 100 kg of payload.
The GRAKSER 4.3 uses one motor to drive its three wheels through a planetary gear and belt drive, featuring a 1:10 transmission ratio.
Specifications
| Max Speed | 8 m/s |
| Weight | 15 kg |
| Max. Payload | 100 kg |
Control
The GRAKSLER 4.3 is fully autonomous during its mission, it features a set of microcontrollers to read in data from an array of redundant sensors to determine its position and distance from the end of the tether as well as an additional microcontroller reading the data transmitted from the climbers CAN bus and driving the motor and other critical systems.
Additionally communication with our ground station enables us to send commands or remote control the climber.